Validação de um sistema de navegação autônoma subaquática
 Ivan Pelegrin Netto, egresso do Programa de Pós-Graduação em Engenharia Mecânica da UFABC, pesquisou, durante o mestrado, acerca de sistemas de navegação autônoma para ambientes subaquáticos.
Ivan Pelegrin Netto, egresso do Programa de Pós-Graduação em Engenharia Mecânica da UFABC, pesquisou, durante o mestrado, acerca de sistemas de navegação autônoma para ambientes subaquáticos.
Seu principal objetivo era validar, de modo experimental, o protótipo de um sistema de navegação de um glider subaquático. Gliders são planadores (ou veículos autônomos) utilizados em pesquisas oceanográficas e coletas de dados em ambientes aquáticos.
Dentre os principais resultados observados, demonstrou-se possível não apenas a validação experimental do sistema, sem ruídos, mas também a elaboração de um método de baixo custo. Segundo o egresso, este trabalho pode contribuir para o avanço dos referidos sistemas de navegação – o que pode otimizar a eficiência energética e a precisão na coleta de dados oceanográficos essenciais.
De acordo com o pesquisador, o refinamento dessa tecnologia reflete-se diretamente na melhoria dos modelos de previsão climática, na preservação de ecossistemas marinhos e na mitigação de riscos ambientais para as indústrias offshore e populações costeiras.
Além de mestre em Engenharia Mecânica pela UFABC, Ivan é bacharel em Engenharia Mecânica. Atualmente, exerce o cargo de Engenheiro na Whirlpool do Brasil, onde também já atuou como pesquisador.
...
Dados | Egresso
Nome completo
Ivan Pelegrin Netto
Formação acadêmica (cursos e instituições)
٠ Mestrado em Engenharia Mecânica | Universidade Federal do ABC (UFABC);
٠ Bacharelado em Engenharia Mecânica | Centro Universitário Fundação Santo André (CUFSA).
Profissão / experiência profissional
٠ Engenheiro de Ramp and Extraction | Whirlpool do Brasil (desde 2026);
٠ Pesquisador | Whirlpool do Brasil via Programa Inova Talentos IEL / IPT (2025);
٠ Cargos de analista de inteligência comercial e mercado em empresas de alimentos, sendo a maior delas a General Mills (2021 - 2024);
٠ Técnico de Serviços Técnicos | Sumitomo Rubber do Brasil (2019 - 2020).
Programa de pós-graduação e curso (mestrado ou doutorado) concluído na UFABC
Mestrado em Engenharia Mecânica.
Como sua trajetória neste curso de pós-graduação na UFABC contribuiu para sua formação?
Eu não teria chegado onde cheguei se não fosse a minha passagem como aluno na UFABC – após uma pandemia e anos fora da minha área de formação. Com os conhecimentos adquiridos na graduação, no mestrado e em trabalhos que fiz no laboratório e montei em casa, pude voltar para a minha área de formação como pesquisador em uma indústria multinacional de eletrodomésticos (Whirlpool, dona das marcas Brastemp, Consul e Kitchen Aid). Meu trabalho foi bem aceito pelo time e, em alguns meses, efetivaram-me para trabalhar como engenheiro no centro de tecnologia de Rio Claro.
...
Dados | Dissertação
Título
Estimação de estado e validação experimental para navegação de um glider subaquático.
Data da defesa
3 de maio de 2019
Nome da orientadora
Profa. Dra. Elvira Rafikova
Linha de pesquisa
Dinâmica de sistemas
Link para a dissertação
...
Questões | Pesquisa
Qual o tema da sua pesquisa e por que o escolheu?
Eu escolhi esse tema porque sempre gostei de desenvolver trabalhos experimentais e protótipos, e de transformar modelos computacionais e simulações em projetos no mundo real.
Quais eram seus objetivos (gerais e específicos)?
Validar um protótipo de sistema de navegação para gliders subaquáticos experimentalmente.
Como foi sua realização (materiais e métodos, metodologia, corpus etc.)?
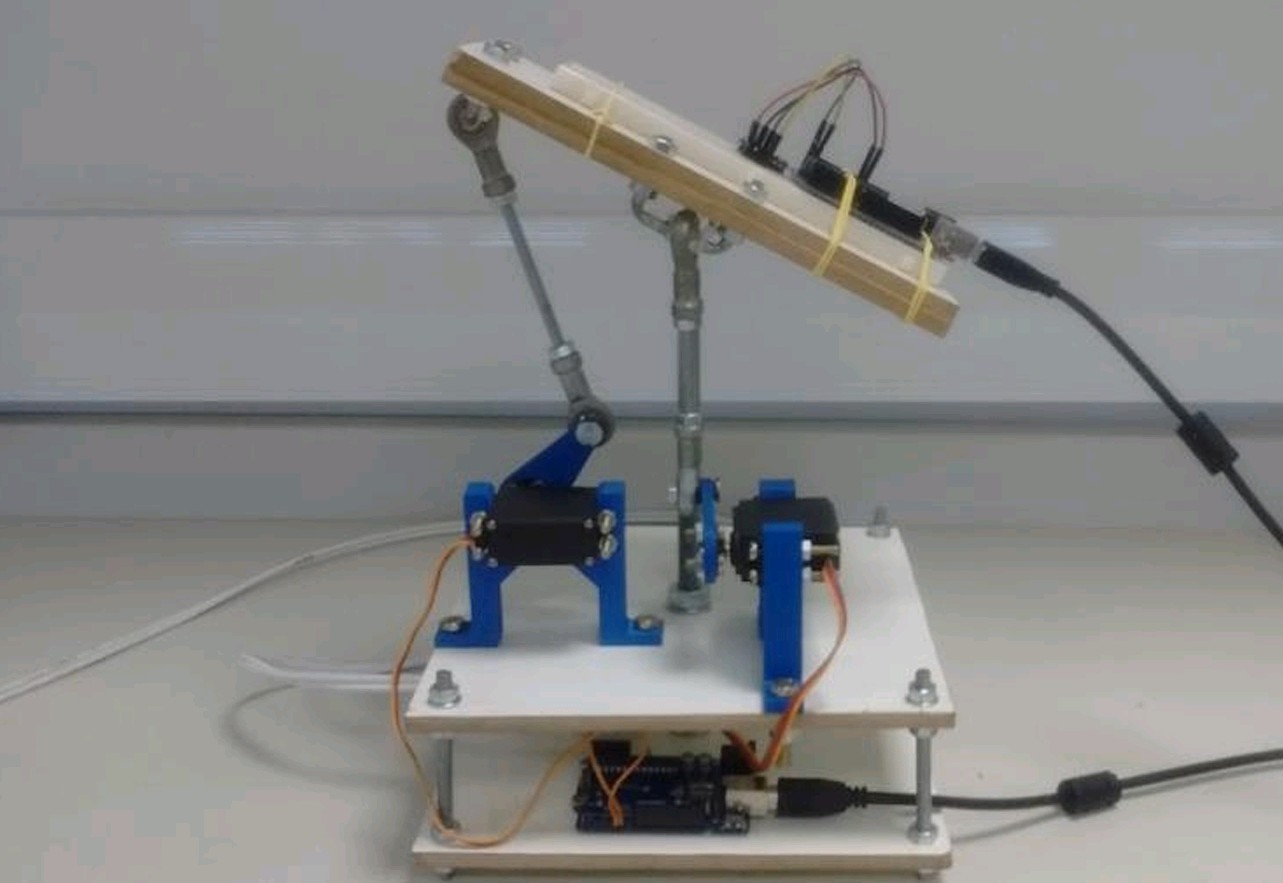
Para a validação do sistema inercial, montamos uma plataforma que executava movimentos padronizados. Esses movimentos eram, então, comparados com os sinais obtidos e avaliados. Utilizamos materiais de baixo custo (muitos comprados na Copafer, nossa vizinha do campus Santo André). A validação do sistema de GPS foi interessante, também. Fizemos um trajeto com o sistema montado em um automóvel – dirigimos do campus São Bernardo até o campus Santo André –, e comparamos os resultados plotados com o Google Maps, obtendo resultados muito próximos entre os dois.
Quais foram os desafios enfrentados?
Era esperado que o sistema inercial apresentasse ruídos, o que é comum para esse tipo de aquisição. Aplicamos filtros matemáticos e conseguimos atenuar o ruído para algo interpretável.
Quais foram os principais resultados alcançados?
Conseguimos validar o sistema de navegação experimentalmente, sem ruídos, e elaboramos um método de baixo custo para a validação.
Descreva, resumidamente, a importância acadêmica e social de sua pesquisa, isto é, sua contribuição para o universo científico e o cotidiano das pessoas.
A relevância acadêmica deste trabalho está no avanço dos sistemas de navegação autônoma para ambientes subaquáticos, o que pode otimizar a eficiência energética e a precisão na coleta de dados oceanográficos essenciais. Sob a perspectiva social, o refinamento dessa tecnologia reflete-se diretamente na melhoria dos modelos de previsão climática, na preservação de ecossistemas marinhos e na mitigação de riscos ambientais para as indústrias offshore e populações costeiras. 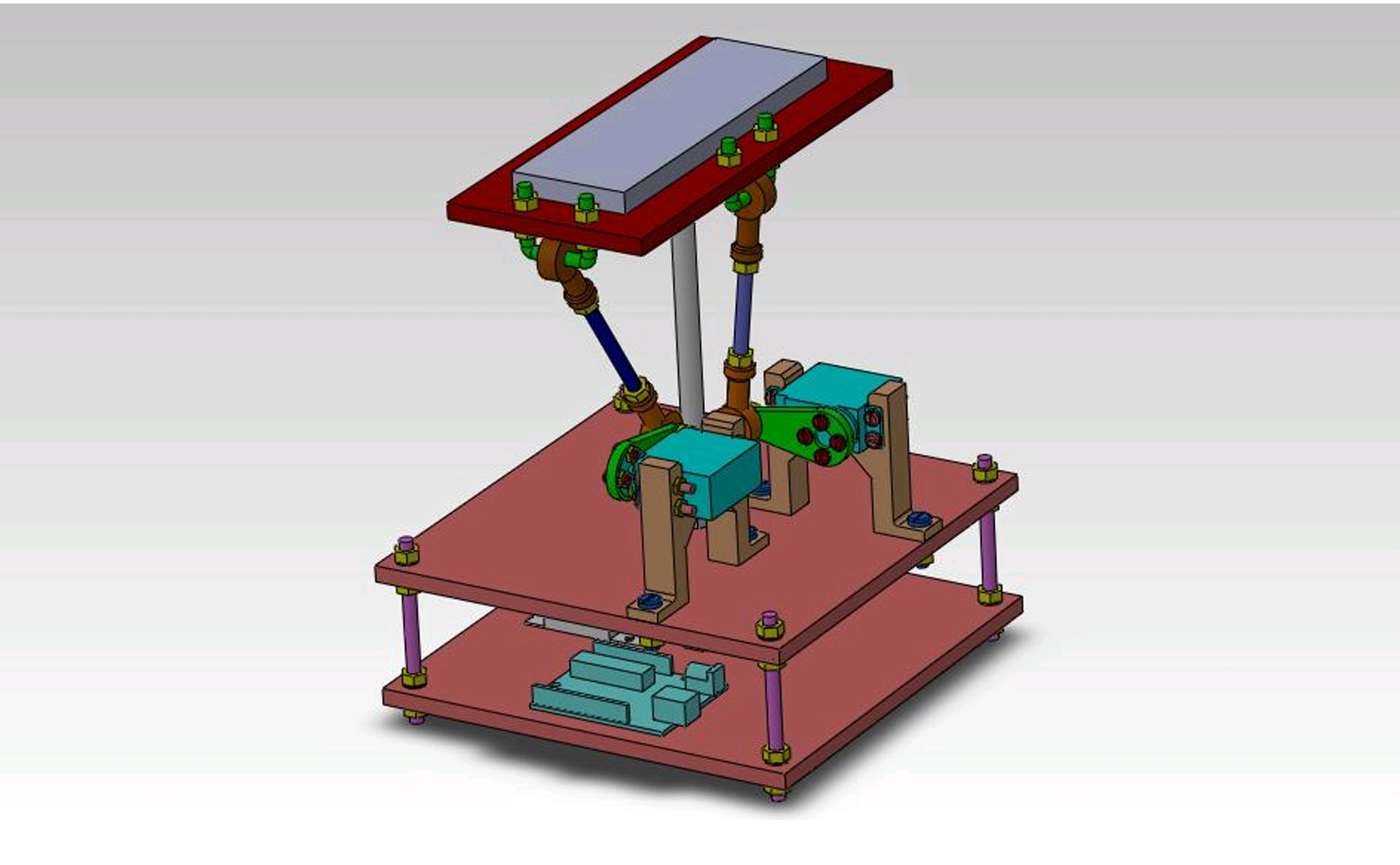

Redes Sociais